线性变换和标准矩阵
章节大纲
-
From earlier chapters we went over linear systems of equations and its relationship to the matrix equation and how essentially there exists a solution if is spanned by the columns of the matrix . Another way we can look at this is saying that is in the range of the linear transformation . A linear transformation is a transformation that satisfies preservation of vector addition and scalar multiplication which will be explained more deeply a bit later.
::从前几章,我们跨过线性方程式系统及其与矩阵方程式Axb的关系,如果b被矩阵A的列横穿,又如何从根本上存在一个解决办法。我们可以从另一个角度看待这一点,即b属于线性变换T(x)=Ax。线性变换是满足矢量添加和缩放倍数的保全的转换,稍后将更深入地加以解释。
In this case the matrix , is known as the standard matrix of the linear transformation. The multiplication of a matrix of m x n dimensions and a vector of n dimensions yields a vector of m dimensions from basic principles of matrix multiplication. The columns of the standard matrix are the vectors where each of the basis vectors get mapped to from this transformation.
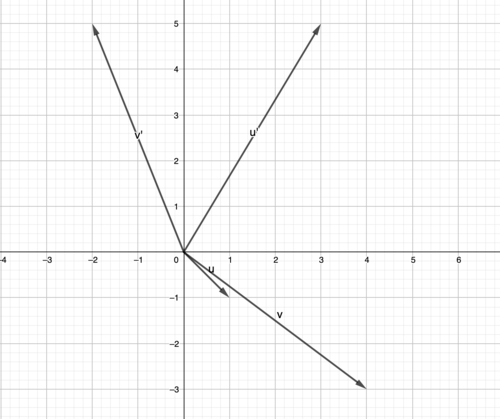
::在这种情况下,矩阵A被称为线性变换的标准矩阵。m x n维度矩阵和 n维量矢量矩阵的倍增从矩阵倍增的基本原则中产生一个m维量矢量。标准矩阵的列是矢量,其中每个基矢量从这一变换中绘制到各个基矢量。Let's say you want to define some transformation where . Looking at this geometrically we see where these vectors map to and can try to visualize what would happen to other vectors.
::假设您想要定义一些变换 T: R2QR2 的 T ([ 1- 1]) = [35] 和 T ([ 4- 3] ) = [- 25] 。 从几何角度看,我们可以看到这些矢量的映射位置,并且可以尝试直观其他矢量会发生什么。The reason linear transformations are called linear transformations is because it holds the property that and . So we see that and so we can treat this as a system of linear equations and solve for the vector value of the basis vectors and then multiply the first equation by -3 to get
::线性变换称为线性变换的原因是它具有T(xy) = T(x)+T和 T(ax) =aT(x) 。 所以我们看到T([10])-T([01]) =[35] 和4T([[10])-3T([01]) =[-25] 的属性,因此我们可以将它作为线性方程系统处理,并解决基础矢量的矢量值,然后将第一个方程乘以-3,以获得-3T([10])+3T([01] =[-9-15]so([10])=[-11-10],然后在T([10] =[14-15]中插入。
::因此,由于直线性,标准矩阵的柱子正是在基准矢量映射所向位置,因为T(x)=Ax基本上产生矢量,即按矢量输入量加权的柱子总和,因此T([x1x2])=T([x10]+[0x2])=T([[x10]+([0x2]))+T([[10]))=x1T([[10])+x2T([01]),这与产品[T([[10])T([01]}}}}[x1x1x2]=A*x%2]=A*x%。
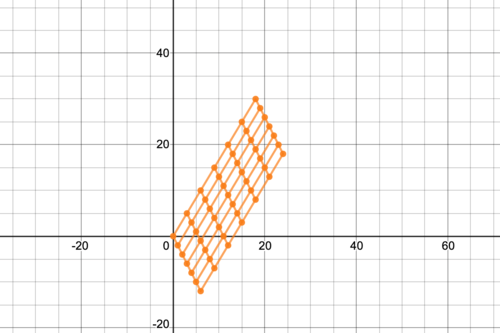
::现在,让我们来分析一下线性变换 对整个飞机的影响。Here the example was with the transformation and you can see that every point in the plane (or in our case some subset of the plane) gets mapped
::这里的例子就是变换 T( x) = [3003) = [3003) xx =[3003] 。 您可以看到, 平面的每个点( 或者我们情况下, 平面的某个子集) 都被映射到向量 [33] 上。 在图片中添加线条, 您也可以看到, 网格线现在被以3 的乘数缩小了 3 。
::这是线性转换的一个关键属性, 即平面上的所有网格线线都保持相等的间距并保持线条。 同样, 线性变换也映射任何线条到任何其他线条。 目前, 任何线性变换都有一个标准矩阵, 使这一属性成为真实, 因为变换是变换基矢量的重量总和, 而您只是在绘制网格的绘图元素, 以便进行总和, 并适当缩放以保持距离 。
::这些例子可以说明这一点:We see here that the grid is rotated and stretched, but no matter what the gridlines always stay parallel and points stay equidistant with respect to a certain metric (i.e. adjacent points are equidistant).
::我们在这里看到,电网是旋转和拉长的,但无论电网线总是平行的,点与某一指标(即相邻点是等距离的)保持等距离。To verify all of this for yourself click on the link in the bottom right hand corner and play with both the transformation and the points to see more about how the mapping works.
::并同时使用变换和点来查看更多关于映射如何运作的图象。For the first linear transformation we had the plane sheered to the right (made to be shaped more like a parallelogram or rhombus) and stretched and rotated clockwise. We ended up getting the equation .
::在第一个线性变换中,我们把平面复制到右边(形状更像平行图或正方形),并按时钟拉伸和旋转。我们最后得到了公式T([xy])=[3x+y2y-x]=x[3-1]+y[12]=[31-12]+[xy]。For the second equation we had a sheer in the opposite direction and then again rotated clockwise about the origin and stretched the plane. And the matrix vector equation came to
::对于第二个方程,我们有一个向相反方向的纯体,然后再次顺时针旋转原位并拉伸平面。而矩阵矢量方程是T([xy] =[-12x+3y13y-4x] =x[-124]+y[313] =[-13413] =[-123413] =[xx] _T(x__)]=[-13413]x__We have now see what some of these linear transformations do. Now, let's look at specific types of linear transformations and find their relative standard matrices or equations.
::我们现在可以看到这些线性变换中有些是做什么的。现在,让我们来看看特定的线性变换类型,找到它们的相对标准矩阵或方程。
Types Linear Transformations
::线性变换Rotation
::轮调The two dimensional matrix that rotates a vector by some angle in the counterclockwise direction.
::在逆时针方向将矢量 x 以某种角度旋转的二维矩阵旋转 。
::R__(x__) = [cos(__)-sin(__)sin(__)sins(__)x__(x1cos(__)-x2sin(__)x1sin(__)x1sin(__)x1sin(__)+x2cos(__)]Example:
::示例:In this example, every point in our domain (which can obviously be extended to the entire x-y plane) was rotated counter clockwise about the origin of an angle of radians, or in other words, degrees.
::在这个例子中,我们域内的每一个点(显然可以扩大到整个X-y平面)都是逆时针旋转的,以反时钟旋转角度为 +4 弧度,换句话说,就是45度。
Scalar transformation
::Scalar 变电where is an arbitrary real number ( then this shrinks the graph whereas if the absolute value is greater than 1 we get a scaling of the entire 2 dimensional x-y plane.
::T(x) = [a00a] x , 其中a 是任意的真实数字( 如果 0<a < 1) , 那么它会缩小图形, 而如果绝对值大于 1, 我们得到整个 2 维 xy 平面的缩放 。We have in example of the second case above with the transformation , but to visualize the second case we have here:
::举例来说,我们有上文的第二个情况,即变换T(x)=[3003]x,但要想象我们这里的第二个情况:Here the transformation is the inverse of the last one:
::这里的变换是最后一个变换的反数 : T ([xy]) = [13x13y] \\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\>\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\
Shear Transformation
::剪切变换Shear transformations are very useful in physics and fluid dynamics. Again, a shear shifts the graph to look like a parallelogram.
::剪切变换在物理和流体动态中非常有用。同样,剪切将图变换成平行图。Shears generally take the form
::剪剪通常采取形式
::T(x__) = T([x1x2] ) = [x1+x2x2] = [1a01] = [x1x2] T(x__) = [1a01] x__or
::或
::T(x__) = T([x1x2] ) = [x1x2+x1] = [10a1] = [x1x2] T(x__) = [10a1]xx__Our example is of this transformation
::我们的例子就是T(x)=T([x1x2])=[x1+13x2x2]}T(x})=[11301]x}
Reflection
::反射反射Any reflection about any line takes the linear transformation form
::任何线的反射都采用线形转换形式。is the angle between the line you are reflecting about and the x-axis.
::T( x) = [cos( 2α) sin( 2α) sin( 2α)-cos( 2α)] x}] , 其中α 是您正在反射的线与 x 轴之间的角 。The vector form of this linear transformation is just which is used here to illustrate the linear transformation which is a reflection over the line .
::这种线性变换的矢量形式只有T([x1x2])=[x1cos(2α)+x2sin(2α)x1sin(2α)x1sin(2α)-x2cos(2α)],此处用于说明线性变换T([[x1x2])=[x1cos(23)+x2sin(23)x1sin(23)x1sin(23)-x2csin(2×3)],它反射到线y=tan(3)xx或y=3x。Because it's hard to see whether or not this is just a rotation (which it inherently is), but rather a reflection I drew the grid in green before the reflection, the line of reflection in red as well as the transformed grid reflected in black.
::因为很难看出这是否仅仅是一个旋转(它本身就是一个旋转), 而是一个反射之前我画的绿色格子, 红色的反射线和黑色的变形格子。Lastly, we have a rotation and dilation combined.
::最后,我们有一个旋转和膨胀的组合。
Rotation-Dilation
::旋转- 参数We will talk more about this later, but matrix multiplication can essentially be thought of as a composition of linear transformations. You see that a linear transformation is essentially just multiplying a matrix by a vector to get another vector. When you multiply through by another matrix you get another vector so you are essentially applying two transformations to a vector. This is just some food for thought, but we will talk more about composition of transformations in the next lesson.
::我们稍后会讨论更多这个问题, 但矩阵乘法基本上可以被视为线性变换的构成。 您可以看到, 线性变换基本上只是将一个矩阵乘以矢量, 以获得另一个矢量。 当您乘以另一个矩阵时, 您可以得到另一个矢量, 这样您就可以对矢量应用两种变换。 这只是一些思考的食粮, 但是我们会在下一个课中更多地讨论变换的构成。Anyway, a rotation-dilation can be written as the product of 2 matrices of one rotation matrix multiplied by one dilation matrix to get
::总之,一个旋转矩阵的2个矩阵乘以一个放大矩阵以获得
::T(x1x2) = ([a00a]) = ([cos(α)-sin(α)sins(α)sins(α)] =[x1x2])By associativity of matrix multiplication we can first take the product of the two matrices and then multiply the two vectors. Additionally, because the dilation matrix is just a scalar multiple of the identity matrix it does not matter which order we compose this transformation in as by definition .
::通过矩阵乘法的关联性,我们首先可以取得两个矩阵的产物,然后乘以两个矢量。此外,由于放大矩阵只是身份矩阵的天平倍数,因此我们按照定义AA-1=I(因此AI=IA)组成这一变异的顺序并不重要。Composing we'll get and from this you'll see multiplying by any matrix of the form you'll get a rotation dilation transformation. However, if the scalar and angle matter to you you would apply the above formula.
::构造中我们会得到T([x1x2]) = [acos(α)-asin(α) asin(α) acos(α) {}}}{[x1x2]],从此,你会看到以窗体[x-yyx] 的任何矩阵乘法乘以乘以。但是,如果您要应用上述公式,您将会得到旋转扩展变形。Now let's see how this comes out geometrically. Our example is
::让我们看看这如何以几何几何方式产生。我们的例子就是or in vector form (which we use to program this on desmos) we get
::T( x) = [10cos( 6)- 10sin( 6) 10sins( 6) 10sins( 6) 10csin( 6) 10csin( 6) x [ 53- 5553] xx 或以矢量形式( 我们用它来在 desmos 上编程此程序) 我们得到 T( [x1x2] = [53x1- 5x25x1+53x2]
Example Problems
::实例问题
Find the standard matrix of the transformation mapping
::查找变换映射T([11])=[43]和T([35])=[1819]的标准矩阵。Using principles of linear equations we can split up this problem to get a system of equations and solve for the vectors to which the standard basis vectors of maps to.
::使用线性方程式的原则 我们可以分解这个问题 来获得一个方程式系统 并解决 R2maps 标准基矢量的矢量 。Our equation comes out to be
::我们的方程式是 T([10])+T([01]=[43]3T([10])+5T([01])=[1819]Multiplying the top equation by -3 and adding the two equations together you can solve for the second basis vector
::乘以 - 3 乘以顶方程, 将两个方方程加在一起, 您可以为第二个基矢量解析两个方程
::3T([10])-3T([01])=[129](Eqn1)3T([10])+5T([01])=[1819](Eqn2)Eqn1+Eqn2]2T([01])=[610]Hence,
::因此,T([01])=[35]Now we cal solve for the first basis vector by plugging into the first equation to get
::现在,我们通过插入第一个方程式来解决第一个基向矢量
::T[10]+[35]=[43],T[10]=[43]-[35]=[1-2]Making those the columns of our standard matrix our transformation gives out to be
::使那些成为我们标准矩阵的柱子
::T(x1x2) = [13-25] = [x1x2]Now, geometrically this just means:
::从几何角度来说,这只意味着:for a small sub square and you can generalize this to the entire plane yourself.
::一个小的子方形 你可以自己把它推广到整个飞机上
Describe the transformation
::描述变换
::T:R2-R2,T(x__)=[1-111]x__Recall from earlier that any dilation and rotation composition of transformations takes the form
::早先曾回顾过,任何变形的变形和变形的变形和旋转组成均以下列形式出现:
::T(x__) = [a-bba] x__And now to find exactly what the scale factors of the transformation are we see that our standard matrix
::现在,为了找出变换的缩放因子, 我们可以看到标准矩阵A=[1-111] =[kcos()-ksin()ksin()kcos()]From this you get that thus and then we solve
::从此您可以得到 cos= 1k 和 sin
then we get and then
::然后我们得到A=[1-111]=[2cos()-2sin()-2sin()-2cos()],然后Cos()=12sin()=12cos()=()=22arcos(22) 4arcsin(22)44So now we see our matrix A is just a rotation of the plane by radians and then a stretch of a scale factor of which can be seen visually as:
::现在我们看到我们的矩阵A 只是用 ++4 弧度旋转的飞机, 然后是 2 的尺度因数的伸展, 可以被看成是: